A South Korean research team, Gwang-Pil Jung and Kyu-Jin Cho, (School of Mechanical and Aerospace Engineering/Institute of Advanced Machines and Design, Seoul National University) and Hong-Cheol Choi (Department of Physics and Chemistry, Korea Military Academy, Seoul) have made progress towards the development of jumping flea robot.
“Inspired by the relationship between leg compliance and jumping performance in the false stick insect, this paper describes how variations in leg compliance and jumping direction affect the performance of a flea-inspired jumping mechanism.”
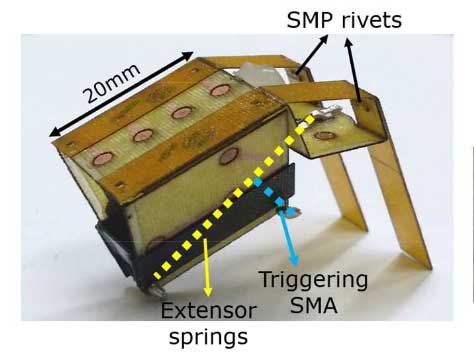
“Our flea-inspired jumping mechanism […] performs take-off with bent legs […] The legs maximally bend in the acceleration phase, and when take-off happens, the legs remain bent. After take-off, bending and unbending of the jumping legs repeats for a while, then reduces gradually owing to damping of the legs.”
The paper doesn’t specify how high the microbot can jump, but the extensors have a spring coefficient of 280 N/m.
See: The Effect of Leg Compliance in Multi-Directional Jumping of a Flea-Inspired Mechanism, which is awaiting print publication in Bioinspiration & Biomimetics, April 2017.
Note: The research was funded by the Defense Acquisition Program Administration under the grant number UD130070ID.